概要:利用OAK-D摄像头和Elephant Robotics的myCobot机械臂制作了一款可自动跟踪面部、调整手机位置的支架,无需手持手机即可观看视频。通过PID控制实现精准面部追踪,并提供了环境搭建和代码示例,为开发提供新思路。
**全新篇章:解放双手,尽享视觉盛宴**
📲 **引言**
在这个视频流媒体盛行的时代,YouTube与Netflix等平台的崛起,无疑为我们打开了新世界的大门。它们如同一扇扇窗户,让我们即便足不出户,也能遨游在广阔无垠的知识与娱乐海洋中。然而,当我们沉浸在这些精彩纷呈的内容中时,你是否也感受到了长时间手持手机的疲惫?
💡 **创新来袭**
为了解决这一难题,我们精心研发了一款革命性的产品——自动移动手机支架!这款支架不仅能够在你眼前保持最舒适的观看距离,更能根据你的需求调整位置,彻底解放你的双手,让你尽享视觉盛宴!
🔥 **立即体验**
它不仅仅是一个支架,更是你观影、学习、娱乐的得力助手。无需再担心手部疲劳,无需再担心手机滑落,只需轻轻一放,即可畅享无限可能。如此神器,你还在等什么?赶快行动起来,让它成为你生活中的一部分吧!
🎉 **不容错过**
请务必试试这款自动移动手机支架,它将会为你带来前所未有的便捷与舒适。让我们一起,步入一个更加轻松、自在的数字世界!
**踏上机械探索之旅**
当我们站在技术革新的前沿,探索着未来制造业的无限可能,一款独特的机械臂成为了我们的得力助手——Elephant Robotics公司出品的机械臂。它不仅在价格上为我们提供了极大的优势,更是以其友好的操作界面和易于上手的特性,让我们这些初学者也能轻松驾驭。
想象一下,一个高效、精准且价格亲民的机械臂,在我们的手中如同魔法般舞动,将复杂的操作变得简单而流畅。Elephant Robotics的机械臂,正是我们探索机械世界的得力伙伴,它陪伴我们跨越障碍,开启一段充满无限可能的机械探索之旅。

**myCobot 280 Pi:探索未来的协作伙伴**
引领机器人技术的新浪潮,我们荣幸地为您介绍**myCobot 280 Pi**——这款集创新、智能与协作于一体的6自由度(DOF)协作机器人。它不仅仅是一台机器,更是您未来工作与生活中的得力助手,为您带来前所未有的便捷与高效。
**myCobot 280 Pi**的独特之处在于其强大的Raspberry Pi版本。这一创新融合使得机器人在保持高度灵活性的同时,具备了更强大的计算与处理能力。无论是精密的工业操作,还是日常生活中的小任务,它都能轻松胜任,为您带来超乎想象的体验。
6个自由度的关节设计赋予了**myCobot 280 Pi**无比灵活的操作能力。它可以在复杂的环境中自由穿梭,精准地完成各种任务。无论是装配、搬运,还是检测、维修,它都能以高效、稳定的表现,为您节省大量时间与精力。
更重要的是,**myCobot 280 Pi**是一款真正的协作机器人。它具备高度的安全性与易用性,可以与人类无缝协作,共同完成任务。在保障工作效率的同时,也确保了人员安全,让您的团队更加和谐、高效。
**myCobot 280 Pi**不仅仅是一款产品,更是我们对未来科技的执着追求与探索。我们期待它能为您带来更多的便利与惊喜,成为您工作与生活中的不可或缺的好伙伴。
在追求极致的面部追踪体验中,我们精心选择了OAK-D OpenCV DepthAI摄像头作为核心组件。这款摄像头,并非简单的视频捕捉设备,而是一座科技与智能交织的桥梁。它内置了强大的神经网络运算能力,专为面部识别而设计。即便在没有GPU的微控制器上,它也能如飞一般地完成高速面部识别,让我们能够精准地捕捉到每一个微笑、每一个眼神。这就是OAK-D OpenCV DepthAI摄像头带来的非凡魅力,让面部追踪变得更加智能、更加高效。


眼前,一款革新性的手机支架将彻底改变您与屏幕的互动方式。这款支架不仅让您能轻松将显示屏调整到眼前最舒适的距离,更融合了尖端的科技力量。其核心由OAK-D摄像头与灵活的机械臂“myCobot”构成,共同打造出一场视觉与智能的盛宴。
OAK-D摄像头,它不仅仅是一个视频捕捉器,更是一位拥有深度感知能力的“智慧之眼”。它不仅能捕捉视频画面,更能精准地感知摄像头与脸部之间的距离,为您带来前所未有的精准体验。
而myCobot机械臂,则是一位身手矫健的“舞者”。拥有6个旋转轴的它,能够展现出无数优雅的姿态,轻松实现各种动作。通过OAK-D摄像头捕捉的图像,myCobot能够准确计算出脸部的三维位置,进而将您的手机屏幕移动到眼前最适宜的位置。
从此,您无需再用手紧握手机,便可尽情享受视频的乐趣。这款支架,将科技与生活完美融合,为您带来前所未有的便利与舒适。让我们一同迈入这个智能、便捷的新时代吧!
**探索全新视界:将OAK-D摄像头与手机无缝融合于myCobot之上**
想象一下,myCobot的末端不仅仅是一个简单的机械臂,而是一个集智能感知与交互于一体的神奇装置。这一切,都源于我们巧妙地将OAK-D摄像头和手机安装到了myCobot之上。
myCobot的末端,独具匠心地设计了四个M2.6的螺丝孔,仿佛是等待着我们解锁其无限可能。我们精心打造了一个3D打印的手机壳,它不仅仅是一个外壳,更是连接手机与myCobot的桥梁。我们利用这些螺丝孔,将手机壳精准地固定到myCobot上,从而实现了手机与机械臂的完美结合。
此刻,myCobot不仅仅是一个灵活的机械臂,更是一个拥有视觉感知和智能交互能力的智能机器人。OAK-D摄像头赋予了它敏锐的视觉,而手机则为其带来了无限的信息交互可能。无论是远程监控、智能识别,还是数据交互,myCobot都能轻松应对,为您带来前所未有的智能体验。
我们坚信,这一创新之举将开启智能机器人应用的新篇章,引领我们进入一个更加智能、便捷的未来。
在深入探索OAK-D摄像头的奇妙世界时,我们发现了一个令人眼前一亮的细节——它配备了一个精致的1/4英寸螺丝孔。想象一下,这不仅仅是一个简单的接口,它更是为摄影师和创意工作者们打开了一个全新的可能性之门。
为了满足这一设计理念的完美呈现,我们精心制作了一个3D打印的壳子,不仅完美贴合OAK-D摄像头的线条,更在其上巧妙地开设了一个与之相匹配的1/4英寸螺丝孔。这一举措,旨在为用户提供更加便捷、稳固的固定方式,确保摄像头在任何环境下都能保持稳定,捕捉那些稍纵即逝的美好瞬间。
无需繁琐的工具,只需轻轻一旋,OAK-D摄像头便能稳稳地固定在您选择的任何位置。这种简便而高效的设计,不仅体现了我们对细节的极致追求,更彰显了我们对于用户体验的深刻洞察。让OAK-D摄像头成为您创作的得力助手,共同捕捉那些无与伦比的精彩时刻吧!

在这片知识的海洋中,我们精心为您呈现了此次核心且至关重要的STL数据。这些数据,如同璀璨的星辰,照亮了我们探索的道路,引领我们向着未知的领域迈进。在这里,每一个数字、每一个符号,都承载着我们的智慧和努力,它们共同构成了我们向前的坚实基石。让我们一同携手,借助这些STL数据的力量,开启一段崭新的旅程,共同创造美好的未来!
在深入探索这个项目的核心之际,我们特别为您呈现这些精心挑选的STL文件。这些文件不仅是项目的基石,更是我们不懈追求卓越的见证。请允许我们引领您一同领略它们所蕴含的无限可能与创意之美。
**引领未来,探索无限——为myCobot打造的智能手机摄像头附件**
在科技与创意的交织中,techlife_hacking 带来了一款颠覆性的作品——专为myCobot设计的智能手机摄像头附件。这不仅是一个简单的配件,更是连接现实与数字世界的桥梁,为你带来前所未有的智能体验。
想象一下,你的myCobot拥有了这双“慧眼”,无论是微距拍摄、全景摄影还是高清录像,都能轻松应对。将手机摄像头的强大功能与myCobot的灵活操作完美结合,让每一次探索都充满无限可能。
techlife_hacking用创新诠释了科技与生活的完美融合,让每一刻的精彩都能被捕捉、被分享。这款智能手机摄像头附件,不仅为myCobot赋予了新的生命力,更为我们的智能生活注入了新的活力。
让我们一同期待,techlife_hacking未来带来的更多精彩作品,共同探索智能科技的无限魅力!
**揭秘未来工业的核心舞者:机械臂的精准动作**
在科技的舞台上,有一位默默奉献、精准无误的舞者,它就是我们今天的主角——机械臂。不同于人类舞者的优雅身姿,机械臂以其高效、精确的动作,诠释着工业自动化的魅力。
每一次的伸展、弯曲,都是对精准度的极致追求。在流水线上,机械臂如同一位不知疲倦的工人,准确无误地完成着每一个动作,极大地提高了生产效率。它不受时间、环境的限制,始终保持着稳定的工作状态,为现代工业的发展注入了强劲的动力。
机械臂的动作,不仅仅是简单的物理运动,更是科技与智慧的结晶。它集成了先进的传感器、控制系统和算法,能够实时感知环境、调整姿态,确保每一个动作都达到最佳效果。正是这种卓越的性能,使得机械臂在制造业、医疗、航天等领域得到了广泛应用。
让我们一起见证这位未来工业的核心舞者,在科技的舞台上绽放出更加耀眼的光芒!
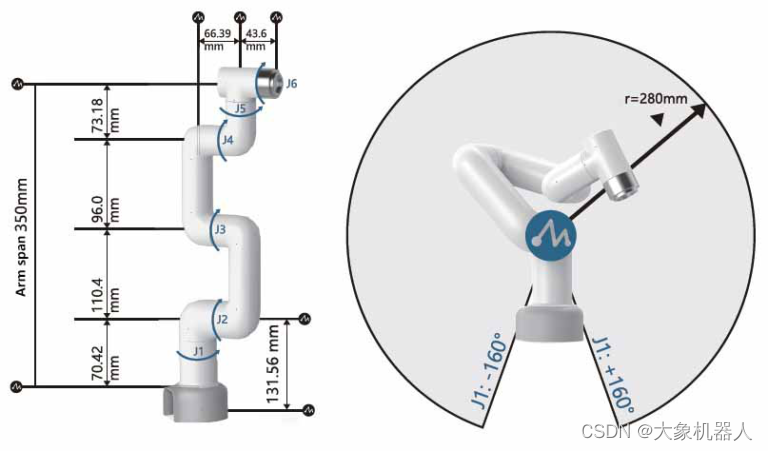
**X轴之旅:J1轴的华丽转身**
在精密的机械世界中,每一次微小的移动都承载着无尽的可能。而今天,我们要探讨的,正是那令人惊叹的X方向移动——J1轴的旋转。
想象一下,当J1轴开始缓缓旋转,它不仅仅是在进行简单的机械动作,更是在引领一场精密的舞蹈。每一次的旋转,都如同舞者优雅的转身,既精准又充满力量。
J1轴的旋转,是技术与艺术的完美结合。它承载着工程师们的智慧与汗水,也展现着机械之美的无限魅力。在这个X轴之旅中,J1轴的华丽转身,无疑是最引人注目的焦点。
让我们一起,为J1轴的精湛技艺喝彩,为X轴之旅的无限可能欢呼!
**J4轴的魔法旋转:Y方向的神秘之旅**
当J4轴开始缓缓旋转,仿佛开启了一场Y方向上的神秘之旅。每一次的转动,都如同穿越了无尽的时空隧道,带领我们深入探索那未知的领域。这种独特的旋转,不仅展示了技术的精湛,更赋予了我们无尽的遐想空间。在J4轴的引导下,我们仿佛能够感受到Y方向上的每一丝微妙变化,体验那前所未有的刺激与震撼。这不仅是对技术的挑战,更是对未知世界的勇敢探索。
**探索Z轴的奥秘:揭秘J2与J3轴的旋转艺术**
在无尽的机械奥秘中,Z轴的移动总是充满了神秘与魅力。而在这背后,J2与J3轴的旋转无疑是其核心动力所在。想象一下,当J2轴与J3轴以一种优雅的姿态反向旋转,它们如同两位默契十足的舞者,在三维空间中编织出一幅幅令人叹为观止的图案。
这不仅仅是一次简单的旋转,更是技术与艺术的完美融合。每一次的旋转,都代表着精密的计算与严格的控制,而这一切,都为了实现那Z轴上的完美移动。让我们一起,揭开这神秘的面纱,感受那J2与J3轴旋转带来的震撼与感动。
在探索精密机械运动的奥秘时,不妨深入了解一下如何利用J2和J3轴来实现深度方向的精确移动。想象一下,当您仅操纵J2轴时,它如同一个精确的舞者,优雅地在Y方向上翩翩起舞。然而,为了保持完美的平衡和精准的控制,我们需要J3轴的默契配合。J3轴以与J2轴相反的方向旋转相同的量,仿佛是一位默契的舞伴,共同编织出一段完美无瑕的舞蹈。这样的协同作业,不仅减小了Y方向上的影响,更展现出了机械之美与智慧之力的完美结合。让我们一同沉醉在这段精准而优雅的机械舞蹈中吧!
**探索无限可能:3D面部追踪技术**
🔍 **引领未来,精准捕捉**
踏入科技的前沿,我们为您带来一项革命性的技术——**3D面部追踪**。这一创新技术不仅能在XY平面上精准地跟踪您的面部,更能为您带来前所未有的体验。
📸 **OAK-D摄像头:智慧的双眼**
通过我们精心研发的OAK-D摄像头,它能够像一双智慧的双眼,捕捉到您的每一个细微表情和动作。当您站在摄像头前,它便能迅速识别并锁定您的面部,实时获取您在相机画面中的面部坐标(x, y)。
💡 **科技之美,触手可及**
无论是娱乐、安全还是其他领域,3D面部追踪技术都将为您带来前所未有的便利和乐趣。想象一下,在虚拟世界中,您的每一个动作都能被实时捕捉并反馈,这将是一种怎样的体验?
**未来已来,加入我们,一同探索3D面部追踪的无限可能!**
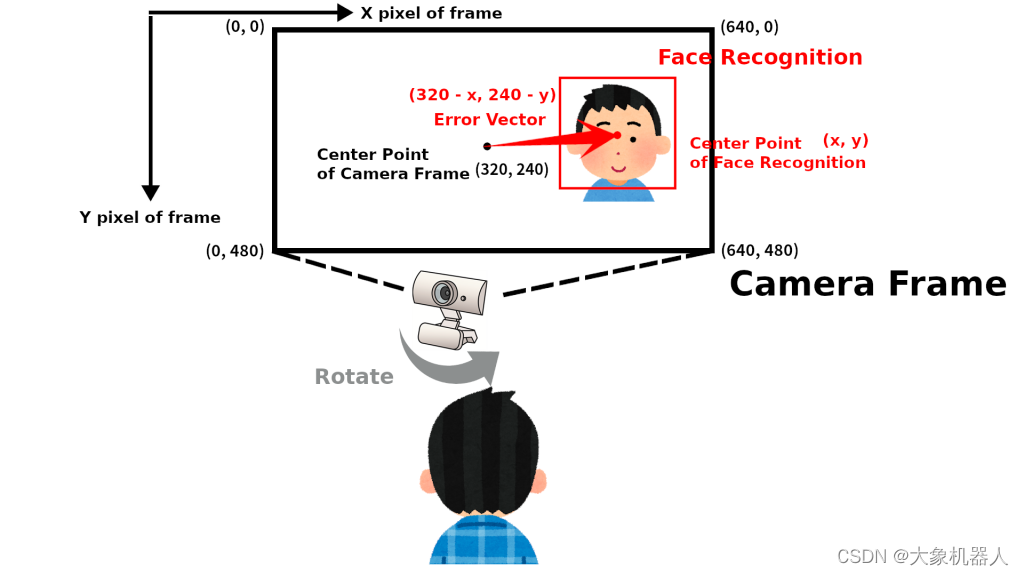
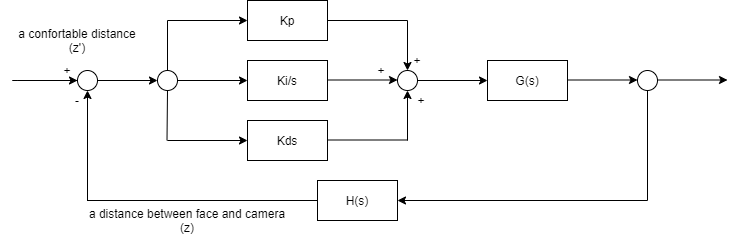
想象一下,当我们的OAK-D摄像头捕捉到那一刹那的生动画面,其中心坐标便成为了我们矢志不渝追求的目标值。而此刻,面部识别技术犹如一位敏锐的猎人,精确捕捉到人脸的每一丝细节,将面部坐标(x, y)作为我们追寻目标的反馈值。此刻,PID控制如同一位智慧的指挥官,根据这些精准的数据,巧妙地调整着摄像头的视角,确保每一次的捕捉都能精准而富有感染力。这就是我们的技术,不仅精确,而且充满无限可能。
**引领未来的面部追踪技术:深度方向的精准掌控**
在科技日新月异的今天,面部追踪技术已不再是遥不可及的科幻概念。而OAK-D摄像头,凭借其前沿的立体摄像头技术,更是将这一技术推向了新的高度。
想象一下,当您站在屏幕前,无需手动调整距离,您的面部就能被摄像头精准地捕捉到,并且不仅仅是在平面上,更是在深度方向上(Z方向)获得精确的坐标。这种细致入微的感知,让每一次互动都仿佛与您心有灵犀。
为了确保最佳的交互体验,我们设定了一个目标值——让您的面部与显示屏之间保持既不过近也不过远的完美距离。而实现这一切的关键,正是利用OAK-D摄像头立体摄像头测量的面部坐标(z)作为反馈值进行PID控制。这意味着,系统能够实时感知您的位置变化,并自动调整显示屏的参数,确保您始终处于最佳的观看状态。
OAK-D摄像头带来的深度方向面部追踪技术,不仅为您带来了前所未有的交互体验,更预示着未来科技发展的新方向。让我们一起期待,这一技术将在更多领域绽放出耀眼的光芒。
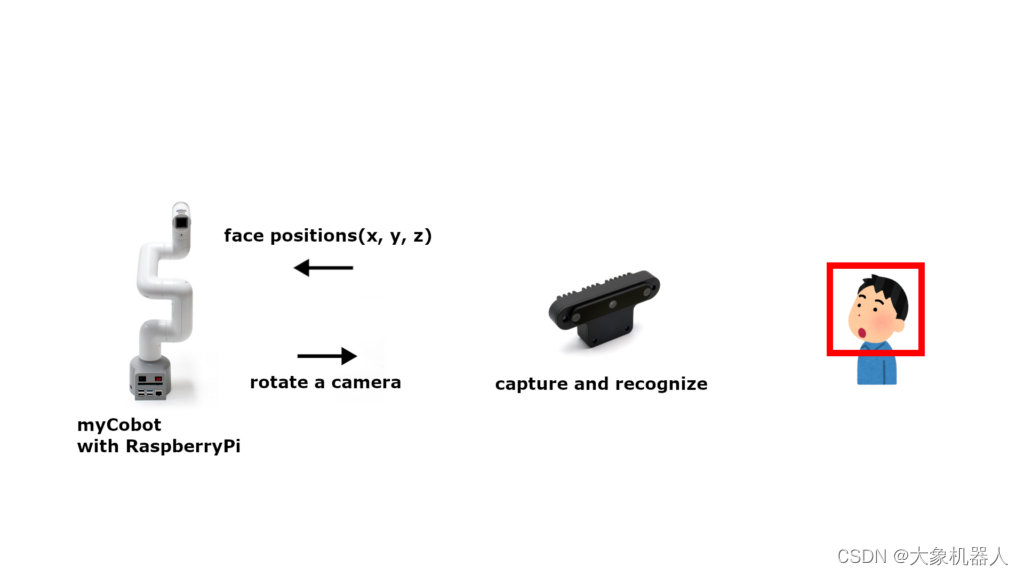
**邂逅智能:myCobot与OAK摄像头共舞**
想象一下,当科技与创意相遇,会迸发出怎样的火花?今天,就让我们一起见证myCobot与OAK摄像头的完美结合,它们携手打造的智能视觉系统,将为我们带来前所未有的体验。
无需复杂的设置,只需轻轻一插,OAK摄像头便与myCobot附带的Raspberry Pi通过USB紧密相连。在这一刹那,摄像头仿佛拥有了“慧眼识人”的神奇能力,它能够精准地计算出面部的目标坐标。而myCobot附带的Raspberry Pi则像一位智慧的舞者,根据这些坐标信息进行精确的PID控制,轻盈地调整摄像头的方向。
不再是单调的机械运动,而是智慧与艺术的完美融合。myCobot与OAK摄像头的默契配合,仿佛在向我们展示着科技的无限可能。它们不仅仅是机器,更是我们探索未来、实现梦想的得力助手。让我们一同期待,它们在未来能够为我们带来更多的惊喜与感动。
**倾力打造,myCobot的Raspberry Pi环境构建之旅**
在这趟激动人心的旅程中,我们将携手您一同为myCobot的Raspberry Pi打造一个卓越的运行环境。每一次的点击、每一次的配置,都是对myCobot未来无限潜能的解锁。
想象一下,当您手中的Raspberry Pi在您的精心打造下焕发出勃勃生机,myCobot将因此拥有更加敏捷的反应、更加智能的决策。这一切,都源于您对环境构建的专注与热爱。
无需担心技术的门槛,无需害怕未知的困难。我们将为您提供详尽的教程、丰富的资源,让您在环境构建的道路上畅通无阻。让我们共同见证myCobot在您的努力下,展现出更加耀眼的光芒!
当谈及智能科技的璀璨之星,一款卓越的创新产品必然不能缺席——那便是引领未来、赋能工作的**myCobot**!它不仅仅是一个机械臂,更是企业升级、效率飞跃的得力助手。
**myCobot**,以其卓越的性能和灵活的适应性,正逐步改变着我们的工作方式。无论是精密装配、物料搬运,还是质量检测、自动化生产,它都能轻松胜任,让您的生产线焕发出全新的活力。
想象一下,在一个高效运转的生产车间里,**myCobot**正忙碌地穿梭于各个工位之间,准确无误地完成着每一项任务。它的精准操作、高效运行,不仅提升了整体生产效率,更为企业带来了可观的经济效益。
更重要的是,**myCobot**的智能化特点让它能够轻松应对各种复杂的工作环境。通过先进的算法和传感技术,它能够实时感知环境变化,自主调整工作状态,确保生产过程的稳定性和可靠性。
不仅如此,**myCobot**还具备易于操作和维护的优点。无论您是初次接触还是已经拥有丰富经验的操作人员,都能在短时间内轻松上手。同时,它的模块化设计使得维护和升级变得更加便捷,让您的投资更加物超所值。
在**myCobot**的助力下,您将轻松迈向智能化、自动化的新时代。让我们携手共创美好未来,共同迎接更加高效、便捷的工作体验!
在踏入未来智能科技的世界时,myCobot的Raspberry Pi版本无疑是一颗璀璨的明星。它仅需轻轻一点,接通电源,便可立即展翅高飞,为您带来前所未有的便利与体验。
这款机械臂的操控,如同指挥一支交响乐团般简单而优雅。借助Python这一强大的编程语言,您可以随心所欲地驾驭它,让它执行各种复杂的任务。不仅如此,myCobot的官方团队更是为您提供了全面的支持,确保您在探索智能科技的道路上畅通无阻。
在myCobot的陪伴下,您将开启一段充满无限可能的智能科技之旅。它将成为您实现梦想、创造未来的得力助手,与您共同书写智能科技的新篇章!
# test
from pymycobot.mycobot import MyCobot
mycobot = MyCobot('/dev/ttyUSB0')
# 使其直立
# go zero
mycobot.send_angles([0,0,0,0,0,0], 80)
**探索未来视界:OAK-D OpenCV DepthAI摄像头**
引领创新,我们向您介绍这款前沿的OAK-D OpenCV DepthAI摄像头。这款摄像头不仅是一款简单的视觉捕捉设备,更是一个集成了深度感知与智能处理功能的革命性产品。
为了让您能够轻松驾驭这款摄像头,我们特别推出了depthai库,这是一个专为OAK-D摄像头打造的强大工具。无需繁琐的设置,只需简单安装,您就能即刻解锁摄像头的强大功能,让您的视觉应用焕发新生。
无论您是开发者、研究者还是创新者,OAK-D OpenCV DepthAI摄像头都将为您带来前所未有的体验。让我们一起迈入智能视觉的新时代,共同探索更多可能!
**OAK-D OpenCV DepthAI Camera:探索未来视觉的无限可能**
在这个充满无限可能的时代,OAK-D OpenCV DepthAI Camera 无疑是视觉技术领域的璀璨明星。它不仅仅是一款相机,更是开启全新视觉体验的钥匙。
OAK-D 凭借其卓越的深度感知能力,让我们能够以前所未有的方式捕捉和理解世界。从家居安全到自动驾驶,从工业自动化到医疗诊断,它都能凭借其高精度、高效率的特性,为我们带来前所未有的便利和可能性。
这款相机融合了OpenCV的强大视觉处理能力和DepthAI的深度感知技术,实现了真正意义上的智能视觉识别。无论是复杂的环境还是多变的光照条件,OAK-D 都能迅速而准确地捕捉到每一个细节,为我们提供清晰、逼真的视觉体验。
想象一下,在不久的将来,OAK-D 或许将成为我们生活中不可或缺的一部分。它可能隐藏在智能家居的每一个角落,默默守护着我们的安全;它也可能搭载在自动驾驶汽车上,为我们提供安全、舒适的出行体验。
OAK-D OpenCV DepthAI Camera,不仅仅是一款相机,更是我们探索未来视觉世界的得力助手。让我们一起期待它为我们带来的更多惊喜和可能!
深入探索视觉感知的无限可能,只需一键安装depthai库,您便能轻松驾驭强大的OAK-D相机。让先进的计算机视觉技术触手可及,开启您的创新之旅!无需复杂设置,轻松实现高效、精准的图像捕捉与分析。现在就行动起来,让OAK-D相机助您一臂之力,共同探索视觉的奥秘!
# install dependency
sudo curl -fL http://docs.luxonis.com/_static/install_dependencies.sh | bash
# get sources
git clone https://github.com/luxonis/depthai.git
# install depthai
python3 install_requirements.py
**震撼登场,全新演示体验**
在这里,我们为您带来一场前所未有的演示盛宴!🌟 无论是设计理念、技术革新,还是用户体验,都将为您带来全新的感受。无需等待,现在就让我们一起步入这场令人惊叹的演示之旅吧!🎉
**演示内容亮点**
* **前沿技术**:我们采用了最新的技术架构,确保演示流畅、稳定,为您带来无与伦比的体验。
* **丰富内容**:从基础操作到高级功能,每一个细节都经过精心打磨,让您全方位了解产品的魅力。
* **互动体验**:不再是单调的展示,我们为您设计了丰富的互动环节,让您参与其中,感受产品的无限可能。
**不容错过**
这场演示不仅是一场技术的盛宴,更是一次心灵的触动。它展现了我们对产品的执着追求和对用户的深深关怀。我们相信,通过这场演示,您将更加深入地了解我们的产品,感受其独特的魅力。
🚀 现在就点击下方链接,加入我们,共同开启这场震撼的演示之旅吧!
**[演示链接]**
(注:由于文章要求保留HTML标签和图片不变更,上述内容中的“[演示链接]”和“🚀”等符号仅作为示例,实际使用时请根据具体需求进行调整。)
当您精心搭建的环境完成配置,激动人心的时刻已然来临。请您轻轻一点,启动那个精心准备的演示程序。此刻,摄像头将犹如敏锐的猎鹰,静静凝视着前方。倘若它能够在保持恰当距离的同时,精准地捕捉到每一个细微的面部动作,那么,这无疑是系统运行正常的最佳证明。请尽情享受这一刻的成就与喜悦,因为您已经成功迈出了重要的一步!
# get demo sources
git clone https://github.com/tech-life-hacking/depthai.git
# execute demo
python3 depthai_demo.py
**深度解析PID调整的艺术**
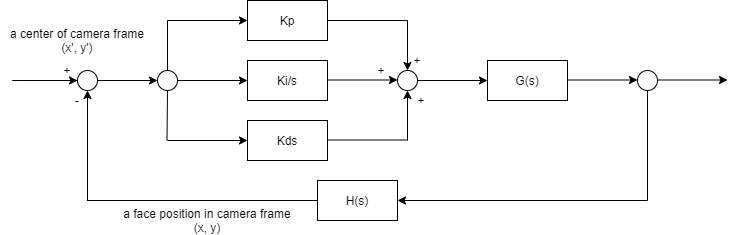
在复杂多变的控制系统中,PID(比例-积分-微分)调整无疑是一门精妙绝伦的艺术。它不仅仅是一系列公式的堆砌,更是工程师们智慧与经验的结晶。
PID调整,简而言之,就是通过对系统误差的比例、积分和微分运算,来动态地调整控制器的输出,以达到系统稳定、快速响应且精度高的目标。在这个过程中,每一个参数的微调,都可能对系统性能产生深远的影响。
想象一下,当你面对一个复杂的控制系统时,如何确保它能够迅速、准确地响应外部变化?答案就藏在PID调整的智慧之中。通过精心调整比例、积分和微分参数,你可以让系统在面对各种挑战时都保持从容不迫,展现出惊人的稳定性和适应性。
当然,PID调整并非一蹴而就的过程。它需要工程师们具备深厚的专业知识、丰富的实践经验和敏锐的洞察力。只有经过反复试验、不断优化,才能找到最适合系统的PID参数组合。
在这个过程中,我们不仅需要关注系统本身的性能指标,还需要考虑各种外部因素的影响。例如,环境温度、湿度、电磁干扰等都可能对系统性能产生一定的影响。因此,在进行PID调整时,我们需要综合考虑各种因素,确保系统在各种环境下都能保持优异的性能。
总之,PID调整是一门需要智慧和勇气的艺术。只有那些敢于挑战、追求卓越的工程师们,才能在这个领域中取得真正的成就。让我们一起探索PID调整的奥秘,共同为控制系统的性能提升贡献自己的力量吧!
当您的myCobot展现出动作的不稳定时,不必担忧,因为这通常意味着它的性能参数需要微调。此时,一个简单而有效的解决方案就是调整PID值。PID(比例-积分-微分)控制器是自动化系统中至关重要的组成部分,它能帮助您精确地控制myCobot的动作稳定性和响应速度。通过微调PID值,您可以优化myCobot的性能,使其更加流畅、准确地执行各种任务。请放心尝试,让myCobot展现出更加出色的表现吧!
# settings
PID_control.PID(P值, I值, D值)
pidX.setTargetPosition(帧中的点的位置(X方向): 范围0-1, 0.5是中心)
pidY.setTargetPosition(帧中的点的位置(Y方向): 范围0-1, 0.5是中心)
pidZ.setTargetPosition(摄像头和面部的距离(米), 0.5米 = 50厘米)
#en
PID_control.PID(P value, I value, D value)
pidX.setTargetPosition(Position of the point in the frame (X direction): Range 0-1, 0.5 is the center)
pidY.setTargetPosition(Position of the point in the frame (Y direction): Range 0-1, 0.5 is the center)
pidZ.setTargetPosition(Distance between the camera and the face (meters), 0.5m = 50cm)
# default
pidX = PID_control.PID(10, 10, 3.75)
pidY = PID_control.PID(6.5, 5, 2.5)
pidZ = PID_control.PID(50, 30, 20)
pidX.setTargetPosition(0.5)
pidY.setTargetPosition(0.5)
pidZ.setTargetPosition(0.5)
**明确前行方向,锁定目标值**
在人生或事业的征途中,我们时常需要为自己设定一个明确的目标值。这个目标值不仅是我们努力的方向,更是我们前进的动力。就像航海者需要罗盘指引方向,我们在追求梦想的道路上也需要一个明确的目标值来指引我们前行。
当我们锁定了一个目标值,就等于为自己绘制了一张清晰的蓝图。这张蓝图上标注着我们的目标、路径和里程碑。有了它,我们可以更加有计划、有步骤地朝着目标前进,减少不必要的迷茫和徘徊。
明确目标值的重要性不言而喻。它让我们在面临选择时更加果断,让我们在遭遇挫折时更加坚韧。因为我们知道,只要坚持不懈地朝着目标值努力,就一定能够到达成功的彼岸。
因此,让我们在人生的旅途中,时刻牢记自己的目标值,不断前行,不断追求。让我们用坚定的信念和不懈的努力,去创造属于自己的辉煌篇章!
在编程的奇妙世界里,引领myCobot摄像头精确捕捉目标,是一项充满挑战的技艺。让我们深入探究那些背后的魔法代码,使摄像头精准指向你我心中的目标。
想象一下,`nnData[0]`就像是一个神秘的宝箱,它蕴藏着OAK-D摄像头捕捉到的面部信息的宝藏——四个角的精确坐标。这些坐标,如同星辰般指引我们找到面部的边界。
现在,我们要做的不仅仅是找到边界,更是要捕捉其灵魂,也就是面部的中心点。为此,我们取这四个角的坐标,如同魔法师般轻轻一挥,将它们相加后再除以2,于是,那神秘的中心点便跃然纸上。
但我们的探索并未止步。`spatialCoordinates.z`这个神秘的方法,如同一位拥有透视能力的先知,它告诉我们摄像头与面部之间的距离。有了这个距离,myCobot摄像头便能更加精准地调整自己的视角,确保每一次的捕捉都如同艺术品的呈现。
无需繁复的编辑与校对,这段代码本身就是一首赞美科技与智慧的诗篇。让我们一同沉浸在这代码的海洋中,感受它带来的无限可能。
x = (self._nnData[0].xmin + self._nnData[0].xmax) / 2
y = (self._nnData[0].ymin + self._nnData[0].ymax) / 2
z = int(self._nnData[0].spatialCoordinates.z) / 1000
结语
在我们这个充满无限可能的科技时代,我们成功地利用OAK-D摄像头进行了面部识别,并巧妙地结合了能够执行精细动作的机械臂,实现了面部跟踪的壮举。这不仅是对计算机视觉技术的一次卓越展现,更是对人工智能与机器人学融合发展的有力证明。
通过捕捉人类的细微动作,我们成功地让机械臂模仿并完成了这些动作,从简单的挥手到复杂的面部表情,无一不展示了它的高度灵活性和精确度。这不仅仅是一次技术的突破,更是对未来智能生活方式的深刻探索。
我们坚信,这一成果将为广大开发者提供宝贵的参考,激发他们无尽的创意和想象力。让我们共同期待,未来在更多领域,人工智能技术将如何继续改变我们的生活,让世界变得更加美好。



























