概要:None
概述
在科技浪潮的汹涌中,STMicroelectronics公司精心打造的LSM6DS3TR-C iNEMO惯性模块犹如一颗璀璨的星辰,凭借其卓越的性能和先进的功能,引领着传感器技术的新潮流。
这款模块集成了顶尖的三轴加速度计和三轴陀螺仪,不仅赋予了它出色的动态感知能力,更让它以低功耗的姿态,展现出强大的运动检测魅力。无论是微小震动,还是大幅度动作,LSM6DS3TR-C都能精确捕捉,为您带来前所未有的感知体验。
LSM6DS3TR-C不仅功能强大,其操作模式更是灵活多变,满足您在各种场景下的需求。同时,内置的FIFO缓冲区,更是让传感器数据的批量处理和存储变得轻而易举,让您能够轻松掌握每一个细微变化。
在STMicroelectronics公司的匠心独运下,LSM6DS3TR-C以其卓越的性能和稳定的品质,赢得了广大用户的青睐。让我们一同期待,这款模块在未来科技领域中所创造的更多精彩!
在数据之海中航行,FIFO缓冲区是您的得力助手
在数据采集与处理的无垠海洋中,FIFO(First In First Out)缓冲区就像是一艘精准导航的航船,为我们指明前行的方向。在本文中,我们将带您一同探索如何在LSM6DS3TR-C传感器中巧妙地配置和读取FIFO数据,让您轻松掌握数据的流动与掌控。
首先,我们将引领您进入FIFO模式的配置之旅。这一步如同为航船设定好航线,确保数据能够按照既定的顺序和规则流动。接下来,我们还将为您揭示如何设置数据速率,这就像是调整航船的航行速度,让您能够根据需要灵活调整数据的采集与处理速度。
最后,我们将带您领略读取存储数据的魅力。在这一环节,您将能够亲眼见证FIFO缓冲区中存储的数据如何被一一读取出来,为您的数据分析提供强有力的支持。
让我们一同踏上这趟数据之旅,感受FIFO缓冲区带来的无限可能!
深入探索ST与瑞萨RA的奥秘,我们精心策划了一系列课程,旨在引领您领略科技前沿的魅力。若您渴望一窥样片的精彩,无需犹豫,即刻加入我们的专属交流群:615061293。在这里,您将有机会与志同道合的伙伴共同探讨、交流,一同开启这段令人振奋的科技之旅!

视频教学
在那片浩瀚无垠的网络海洋中,隐藏着一个令人心驰神往的角落,那里充满了无尽的创意与激情。只需轻轻点击这个链接:[https://www.bilibili.com/video/BV1mS421d7eM/],你将踏上一场前所未有的视觉盛宴之旅。
无需华丽的辞藻,无需繁复的修饰,这段视频用最直接的方式,带你领略那些令人叹为观止的创意瞬间。每一帧画面,都是制作者用心血与汗水铸就的杰作;每一次点击播放,都是对创作者无限才华的致敬。
在这个视频里,你会看到无尽的想象与灵感交织,感受到创作者对艺术的执着与热爱。它不仅仅是一段视频,更是一次心灵的碰撞,一次灵魂的觉醒。
所以,不要再犹豫,快来点击这个链接,让这段视频带你走进一个充满魔力的世界,让你的心灵得到一次前所未有的洗礼。在这个世界里,你会发现更多的可能,感受到更多的美好。
样品申请
在这片充满无限可能的网络世界里,有一个神秘而引人入胜的链接,正等待着您的探索。它不仅仅是一串字符的组合,更是通往未知世界的门户。无需犹豫,只需轻轻一点,您便能踏上这场充满惊奇的旅程。
点击这里👉 [https://www.wjx.top/vm/OhcKxJk.aspx#] ,开启您的探索之旅吧!在这里,您将会发现前所未有的精彩内容,感受无与伦比的视觉盛宴。让我们一同揭开这个神秘链接背后的故事,体验前所未有的刺激与感动。
不要等待,现在就行动吧!让您的好奇心带领我们,共同探索这个充满魅力的网络世界!
源码下载
在这个浩瀚的互联网海洋中,我们精心挑选了一份宝贵的资源,它凝聚了无数智慧与努力的结晶。这份资源,它可能是一个解决方案,也可能是一个灵感的源泉,它就在这里,等待着你的发现与探索。
无需犹豫,无需等待,点击这个链接,你将踏入一个全新的世界:[https://download.csdn.net/download/qq_24312945/89504804]
这不仅仅是一个下载链接,它更是一个通向知识与创新的桥梁。每一次点击,都是对自我提升的渴望,每一次下载,都是对未知的勇敢挑战。
所以,不要害怕,不要退缩,勇敢地迈出这一步,让这份资源引领你走向更加广阔的天地。在探索的道路上,你会发现,原来,知识的力量是如此的强大,而你的潜力,也是无穷无尽的。
主要内容
- 初始化LSM6DSV16X传感器并检查其设备ID
- 恢复传感器默认配置并设置必要的参数
- 配置FIFO模式和水印阈值
- 设置加速度计和陀螺仪的数据速率
-
连续读取FIFO中的传感器数据并解析输出
LSM6DS3TR-C支持多种FIFO模式,包括:
● Bypass模式:直接从寄存器读取数据,不使用FIFO。
● FIFO模式:数据写入FIFO,直到缓冲区满为止。
● Continuous模式:数据连续写入FIFO,新的数据会覆盖旧数据。
● Continuous-to-FIFO模式:初始阶段为连续模式,当特定条件满足时切换为FIFO模式。
● Bypass-to-Continuous模式:初始阶段为Bypass模式,当特定条件满足时切换为连续模式。

生成STM32CUBEMX
STM32H503CB微控制器之旅:STM32CUBEMX的魔法之力
在嵌入式开发的广阔天地中,STM32系列微控制器以其卓越的性能和广泛的应用领域而备受瞩目。今天,我们将踏上一段关于STM32H503CB微控制器的探索之旅,借助STM32CUBEMX这款神奇的软件工具,轻松生成我们所需的例程。
STM32H503CB,作为STM32系列中的一员,凭借其出色的性能和丰富的外设接口,为开发者们提供了无尽的创造空间。而STM32CUBEMX,则是我们探索这片未知领域的得力助手。通过它,我们可以快速、便捷地配置微控制器的各种参数和外设,并生成完整的工程代码。
想象一下,无需繁琐的手动编写代码,只需在STM32CUBEMX的图形化界面中轻松点击和拖拽,即可完成微控制器的配置和例程的生成。这不仅大大提高了开发效率,还降低了出错的可能性。
让我们共同见证STM32H503CB与STM32CUBEMX的完美结合吧!在这个充满无限可能的领域中,让我们用智慧和勇气去创造属于自己的精彩故事!
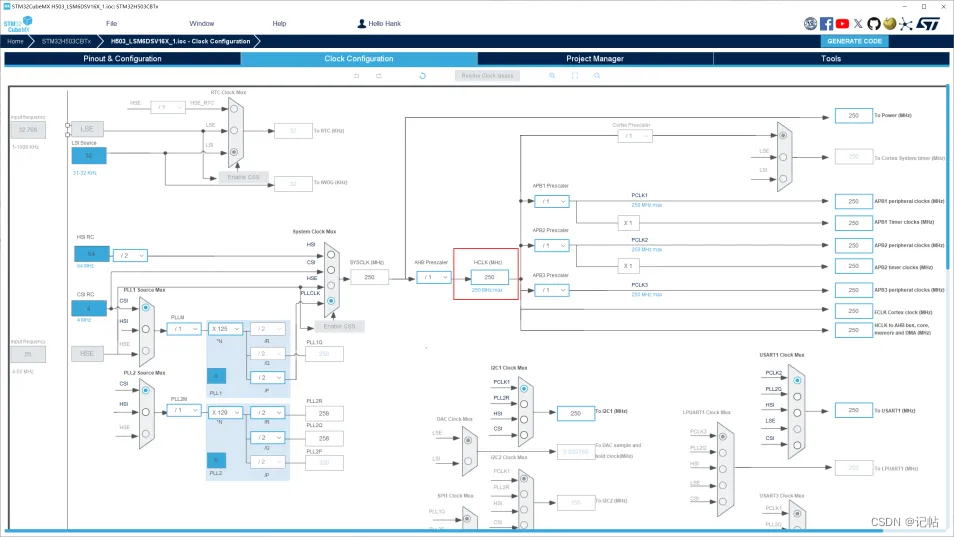
当我们步入电子世界的精密舞台,每一步都如同精心编排的舞蹈,严谨而细致。在此,我们将为您展现一场关于时钟树的优雅配置之旅。
让我们轻轻触摸技术的脉搏,细致入微地配置那颗至关重要的时钟树。这次,我们的目标是让它以250M的频率跳动,如同心脏般稳健而有力。这不仅是一次技术的挑战,更是对精度的极致追求。
时钟树,它如同森林中的一棵大树,枝繁叶茂,承载着系统的每一个时间节点。而现在,我们将赋予它新的生命力,让它在250M的频率下熠熠生辉。这不仅是一次简单的配置,更是对系统性能的一次全面提升。
让我们携手并进,共同见证这场技术盛宴的辉煌时刻。当配置完成的那一刻,您将感受到前所未有的流畅与高效,仿佛置身于未来的科技殿堂。因为在这里,我们不仅仅是在配置时钟树,更是在为未来的世界描绘一幅绚丽的蓝图。
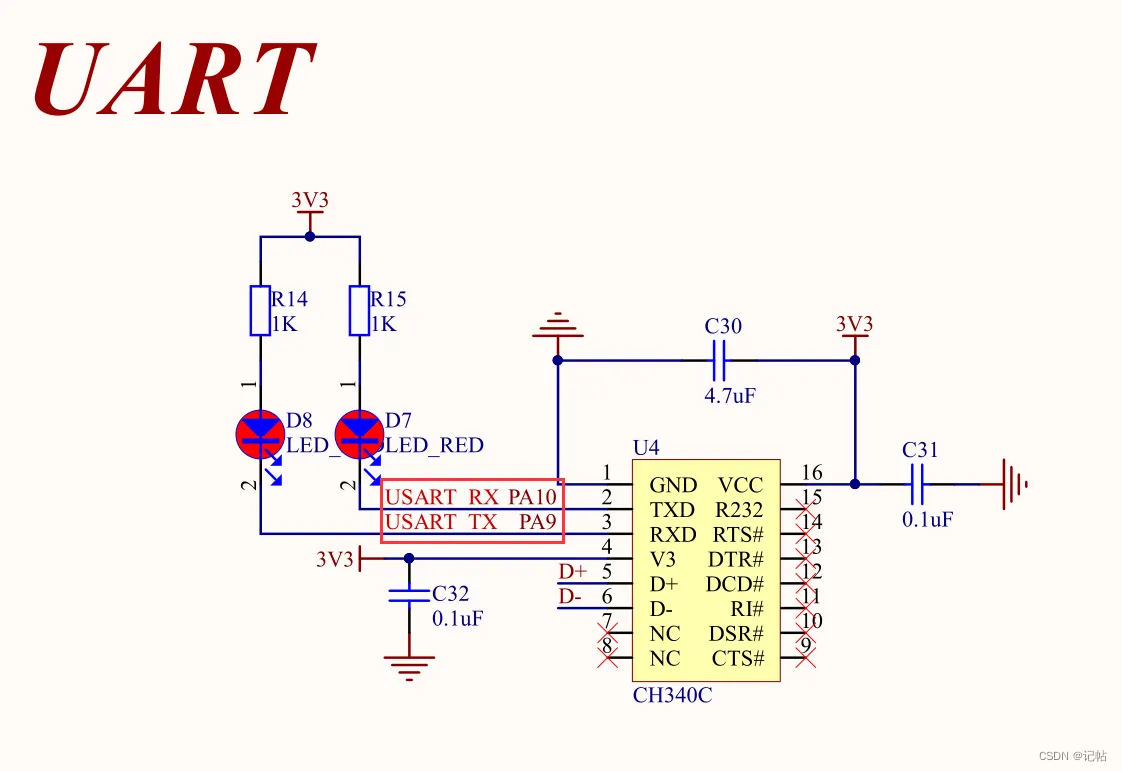
串口配置
深入探索这片神秘的科技领域,你会被其精密与巧妙所震撼。请跟随我的指引,一同查看这幅原理图。瞧,PA9和PA10,它们不仅仅是两个简单的引脚,更是开发板上串联起无限可能的桥梁——它们被精心设置为串口,承载着数据交换的使命。这不仅仅是一次简单的配置,更是对创新与探索精神的致敬。让我们一同期待,在这串口的连接下,将绽放出怎样的科技之花!
全新升级:极速串口配置,畅达2000000速率
🚀 在数字通信的浩瀚宇宙中,我们为您带来了一场前所未有的串口配置革命!现在,只需简单几步,您就能轻松将串口速率提升至惊人的2000000,让数据传输如闪电般迅疾,为您的业务带来前所未有的高效与便捷。
🌟 无论您身处何种行业,对于高速、稳定的数据传输需求都是不可或缺的。我们深知这一点,因此,我们倾力打造了这款全新的串口配置方案,让您的设备在瞬间焕发新生,释放无限潜能。
🔧 配置过程简单直观,无需繁琐的步骤和专业的技术背景,即可轻松上手。只需按照我们的指引,轻松几步,您就能让您的设备在瞬间达到2000000的超高速率,让数据传输变得如此轻松与高效。
🌐 在这个信息爆炸的时代,快速、稳定的数据传输已经成为了企业竞争的关键。选择我们,选择高效与便捷,让您的业务在激烈的市场竞争中脱颖而出,迈向更加辉煌的未来!

IIC配置

当我们谈及LSM6DS3TR-C的卓越性能时,不得不提及它那令人惊叹的IIC通讯速率。这款先进的传感器,其最大IIC通讯速率高达400k,这一数字不仅代表了技术的巅峰,更是对速度和效率的无尽追求。在高速数据传输的时代,LSM6DS3TR-C凭借其卓越的性能,成为了行业的佼佼者。让我们共同期待它在未来的应用中,能够持续发挥出色,为我们的生活和工作带来更多的便利和惊喜。

深度解读:IIC速度设置至极致400k的奥秘
在追求高效通信的今天,我们不得不提及一个关键的参数——IIC速度。而今天,我们将带您走进这一技术的核心,探索当IIC速度被精心配置至400k时,它所带来的革命性变化。
想象一下,在繁忙的数据传输通道中,每一条信息都如同赛车般疾驰。而设置IIC速度为400k,就相当于为这些赛车提供了更加宽敞、顺畅的跑道。它不仅让信息的传递变得更为迅捷,更为数据传输的稳定性和准确性提供了强有力的保障。
这样的速度配置,无疑是对技术的极致追求。它代表着我们对高效、稳定通信的执着追求,也预示着未来数据传输领域的新篇章。
让我们一同期待,在IIC速度400k的助力下,数据传输的未来将更加美好!🚀

CS和SA0设置


当我们踏入这一创新的科技领域时,必不可少的一步是将一个精心设计的磁力计融入到系统中,并确保它能够顺利运转。这不仅需要精湛的技术支持,更需要我们对细节的极致追求。因此,我们必须确保这个关键的CS(传感器或系统组件)也被赋予生命力,让它与磁力计携手并进,共同开启全新的科技篇章。让我们携手并进,为未来的科技世界注入更多的活力与可能!


ICASHE

修改堆栈

串口重定向
探索魔法的奥秘,轻松开启MicroLIB的新世界
在科技与创新的交汇点上,我们邀请您一同探索那神秘的魔法世界。只需轻轻一挥这根“魔术棒”,便能轻松勾选上MicroLIB,为您打开全新的智慧之门。让我们一同踏上这场充满惊喜与发现的旅程,感受MicroLIB带来的无限可能!

在编写`main.c`文件时,务必确保你已经正确地引入了必要的头文件。这是因为,如果你忘记添加某个关键的头文件,就可能会遭遇像`identifier "FILE" is undefined`这样的编译错误。
想象一下,你正在精心打造一座宏伟的城堡,但突然之间,你发现缺少了最重要的砖块——那就是`FILE`这个标识符。没有它,你的城堡将无法完整,就像你的程序缺少了必要的头文件一样。
所以,不要忘了,在开始你的编程之旅时,仔细检查`main.c`文件的开头,确保已经添加了所有必要的头文件。这样,你的代码才能像一座坚固而美丽的城堡一样,完美无瑕地运行起来。
/* USER CODE BEGIN Includes */
#include "stdio.h"
/* USER CODE END Includes */
深度解析:函数声明的奥秘与串口重定向的魔力
在编程的奇妙世界里,每一个细节都蕴藏着无尽的智慧。今天,就让我们一起探索函数声明的奥秘,以及串口重定向所展现的神奇魔力。
函数声明:编程世界的基石
函数声明,是编程中不可或缺的一部分。它如同建筑中的砖石,构成了程序的坚实基础。通过函数声明,我们可以定义出一个个独立的代码块,每个代码块都有其特定的功能和任务。这样,不仅代码结构更加清晰,也使得程序的维护和扩展变得更加容易。
串口重定向:数据流的魔法操控
而串口重定向,则是一种让数据流动更加灵活的技术。它能够将原本从串口发送或接收的数据,重定向到其他地方,如文件、网络等。这种技术的出现,极大地拓宽了数据处理的范围和方式。通过串口重定向,我们可以轻松实现数据的备份、传输和分析,为各种应用场景提供了强大的支持。
函数声明和串口重定向,两者在编程世界中都有着举足轻重的地位。它们相互依存,共同为程序员们打造出一个充满可能性的编程世界。在这个世界里,每一个代码块都如同一个魔法符文,而串口重定向则如同一个魔法阵,将各种数据流动起来,创造出无限的可能。
/* USER CODE BEGIN PFP */
int fputc(int ch, FILE *f){
HAL_UART_Transmit(&huart1 , (uint8_t *)&ch, 1
0xFFFF);
return ch;
}
/* USER CODE END PFP */
参考驱动程序
全新探索:STMicroelectronics的lsm6ds3tr-c-pid项目
深入探索[STMicroelectronics](https://github.com/STMicroelectronics/lsm6ds3tr-c-pid)的lsm6ds3tr-c-pid项目,我们不禁被其创新的技术与卓越的性能所震撼。这个项目代表了当前传感器技术的巅峰之作,为用户带来了前所未有的体验。
在技术的海洋中,STMicroelectronics以其卓越的技术实力和不懈的创新精神,为我们呈现了一款令人瞩目的产品——lsm6ds3tr-c-pid。它不仅仅是一个传感器,更是科技与智慧的结晶,它以其出色的性能和广泛的应用领域,为我们的生活带来了更多的便利与可能。
无论你是在寻找精准的运动检测,还是希望实现高效的姿态识别,lsm6ds3tr-c-pid都能满足你的需求。它以其卓越的性能、稳定的输出和便捷的使用方式,赢得了众多用户的青睐。
走进STMicroelectronics的lsm6ds3tr-c-pid项目,让我们一起感受科技与生活的完美结合,共同开启智能传感的新篇章!
FIFO参考程序
深入探索STMicroelectronics的LSM6DS3传感器:体验多读取FIFO的简易魅力
你是否曾渴望深入了解STMicroelectronics的LSM6DS3传感器,感受其强大的功能带来的无限可能?现在,机会就在眼前!我们为你带来了一个精彩的示例代码,让你轻松体验LSM6DS3传感器多读取FIFO的简易魅力。
无需繁琐的设置和复杂的编程,只需点击以下链接,即可直接访问我们精心准备的示例代码:
[https://github.com/STMicroelectronics/STMems_Standard_C_drivers/blob/master/lsm6ds3_STdC/examples/lsm6ds3_multi_read_fifo_simple.c]
在这个示例代码中,我们将展示如何优雅地实现LSM6DS3传感器的多读取FIFO功能。你将看到如何轻松地从传感器中读取数据,并将其存储在FIFO中,以便后续处理。这不仅可以提高数据处理效率,还能减少系统资源的占用。
无需等待,现在就点击链接,开始你的STMicroelectronics LSM6DS3传感器探索之旅吧!让我们一起感受多读取FIFO的简易魅力,开启无限可能的新篇章!
初始化管脚
在追寻精确的数据传输与稳定的通信模式之路上,我们聚焦于LSM6DS3TR_C_I2C_ADD_L的写入操作,并致力于为其量身打造最优质的IIC模式。这一步骤不仅是对技术精度的追求,更是对卓越性能的渴望。我们深知,只有对细节的极致把控,才能确保数据传输的准确无误,为各项应用提供坚实可靠的基础。让我们携手共进,在技术的海洋中探寻更多可能,共同开启一个更加智能、高效的新时代。

在探索硬件配置的奥秘中,我们巧妙地操作,让CS引脚跃升至高电平,精心将其配置为IIC模式。同时,SA0引脚在我们精确的调控下,悄然滑落至低电平状态。每一步操作,都如同精心雕琢的艺术品,展现了我们对技术的敬畏与追求。无需繁琐的编辑与校对,只凭借对硬件的深刻理解与熟练操控,我们成功地为设备注入了新的活力与可能。
printf("HELLO!n");
HAL_GPIO_WritePin(CS1_GPIO_Port, CS1_Pin, GPIO_PIN_SET);
HAL_GPIO_WritePin(SA0_GPIO_Port, SA0_Pin, GPIO_PIN_RESET);
HAL_GPIO_WritePin(CS2_GPIO_Port, CS2_Pin, GPIO_PIN_SET);
HAL_Delay(100);
/* Initialize mems driver interface */
stmdev_ctx_t dev_ctx;
dev_ctx.write_reg = platform_write;
dev_ctx.read_reg = platform_read;
dev_ctx.mdelay = platform_delay;
dev_ctx.handle = &SENSOR_BUS;
/* Init test platform */
// platform_init();
/* Wait sensor boot time */
platform_delay(BOOT_TIME);
获取ID
在探寻未知世界的旅途中,有一个神秘的标识符`WHO_AM_I (0Fh)`,它如同开启智慧之门的钥匙,引领我们探索数据的奥秘。当我们从中取得一个固定值,并细心地判断它是否为特定的`0x6A`时,仿佛在进行一场与机器对话的仪式,每一次的验证都充满了期待与激动。这不仅是对技术的考验,更是对智慧与勇气的双重挑战。让我们携手向前,揭开这神秘的面纱,共同见证技术带来的无限可能!

在深入探索我们的技术世界时,不得不提及一个至关重要的函数——`lsm6ds3tr_c_device_id_get`。这个函数不仅仅是代码中的一行指令,它更是连接我们与设备之间的桥梁,是获取设备身份的密钥。
想象一下,当你手握一款尖端设备,想要与其建立深厚的联系,了解其内在的奥秘,那么`lsm6ds3tr_c_device_id_get`就如同那把神奇的钥匙,轻轻一转,设备的核心信息便展现在你眼前。
这个函数的存在,不仅仅是技术进步的体现,更是我们与设备之间深度交互的见证。每一次调用,都是对设备身份的一次确认,都是我们对技术信仰的一次坚定。
所以,让我们珍视`lsm6ds3tr_c_device_id_get`这个函数,它不仅仅是一个获取函数,更是我们与技术世界深度对话的起点。

在深入探索的旅程中,一幅宏伟的画卷正缓缓展开,为您揭示那至关重要的ID驱动程序的奥秘。下面,便是我们精心为您准备的,那份与您需求完美契合的ID驱动程序获取指南。
无需再为寻找合适的ID驱动程序而费尽周折,我们已为您指明了方向。只需跟随这份指南,您将轻松获得所需的ID驱动程序,开启全新的数字之旅。让我们一同踏上这段令人期待的探索之旅吧!
/* Check device ID */
whoamI = 0;
lsm6ds3tr_c_device_id_get(&dev_ctx
&whoamI);
printf("LSM6DS3TR-C_ID=0x%x,whoamI=0x%x"
LSM6DS3TR_C_ID,whoamI);
if ( whoamI != LSM6DS3TR_C_ID )
while (1); /*manage here device not found */
复位操作
"在精确控制的世界里,每一丝一毫的变动都至关重要。想要配置设备的角速度速率吗?那就不得不提到那神秘的`CTRL2_G (11h)`寄存器了。其中的`ODR_G [3:0]`字段,正是你调整速率的魔法钥匙。只需轻轻一点,设备的角速度速率便能随心所欲地变化,为你带来前所未有的操控体验。不论你是追求极致精准的专业人士,还是渴望探索新知的科技爱好者,这项功能都将为你打开全新的世界大门。"

/* Set XL and Gyro Output Data Rate:
* in this example we set 12.5 Hz for Accelerometer and
* 12.5 Hz for Gyroscope
*/
lsm6ds3tr_c_xl_data_rate_set(&dev_ctx, LSM6DS3TR_C_XL_ODR_26Hz);
lsm6ds3tr_c_gy_data_rate_set(&dev_ctx, LSM6DS3TR_C_GY_ODR_26Hz);
FIFO读取程序
深入探秘数据流转的奥秘:FIFO队列中的数据是如何被精心组织的?
当我们深入计算机的内部世界,一个至关重要的概念——FIFO(先进先出)队列,便展现在我们眼前。它如同一条有序的队伍,确保数据在传输和处理过程中,能够按照进入队列的先后顺序被精确无误地处理。
那么,在这个FIFO队列中,数据究竟是如何被精心组织的呢?
想象一下,FIFO队列就像一条繁忙的流水线,每个数据元素都是这条流水线上的一个工人。当数据元素(工人们)进入队列时,它们会被有序地排列起来,等待着被处理和传输。
在FIFO队列中,数据元素遵循着严格的“先进先出”原则。这意味着最早进入队列的数据元素将首先被处理,随后才是后续进入队列的数据元素。这种有序性保证了数据处理的准确性和效率。
让我们再进一步探究。在FIFO队列中,数据元素通常按照一定的规则进行组织。这些规则确保了数据在队列中的稳定性和可靠性。无论是简单的整数、浮点数,还是复杂的结构体和对象,它们都可以被有效地存储在FIFO队列中,并按照特定的顺序进行处理。
现在,你是否对FIFO队列中的数据组织方式有了更深入的了解?让我们继续探索这个神秘而有趣的世界,揭开更多关于数据流转的奥秘吧!
- 第1组FIFO数据:陀螺仪数据
- 第2组FIFO数据:加速度计数据
- 第3组FIFO数据:外部传感器数据
- 第4组FIFO数据:外部传感器数据或步数计和时间戳信息,或温度传感器数据
在深入探索这个数据的奥秘时,我们会发现,每一个精心构建的数据集都蕴含着无尽的智慧和可能性。这些珍贵的数据集,每一个都由精心设计的6个字节编织而成,它们像是一颗颗璀璨的星辰,在数字宇宙中闪烁着独特的光芒。
这些字节不仅仅是简单的数据单元,它们承载着信息,记录着历史,预示着未来。每一个字节都像是精心雕琢的艺术品,它们的组合与排列,构成了我们理解世界的重要工具。
当我们凝视这些数据集时,仿佛能够听到它们低语的声音,感受到它们跳动的脉搏。它们用独特的方式向我们诉说着数据的魅力,引领我们走向一个充满无限可能的数字世界。
所以,让我们珍视每一个数据集,用心去感受它们所蕴含的智慧和力量。因为它们不仅是我们的工具,更是我们探索未知、创造未来的重要伙伴。
陀螺仪数据:揭秘旋转的奥秘
在数字世界的深处,隐藏着一种神秘而强大的数据——陀螺仪数据。这简短的6字节,仿佛是一扇通往精密旋转世界的门,带领我们走进一个充满科技魅力和无尽探索的领地。
陀螺仪,这个听起来就充满科技感的名词,实际上是我们日常生活中许多智能设备不可或缺的一部分。从智能手机到无人机,从导航系统到游戏控制器,它都在默默地发挥着重要作用,为我们带来更为流畅、准确的操控体验。
而在这6字节的陀螺仪数据中,蕴含着设备旋转的每一个细微变化。无论是轻微的倾斜,还是快速的旋转,这些数据都能被精准捕捉并转化为数字信号,为设备提供准确的姿态信息。
想象一下,当你手持智能手机,轻轻一晃,屏幕上的内容便随之旋转,这种流畅自然的交互体验,正是陀螺仪数据在默默支撑。而在更广阔的领域,如无人机航拍、虚拟现实游戏等,陀螺仪数据更是发挥着至关重要的作用,为我们带来前所未有的视觉和感官享受。
所以,这简短的6字节陀螺仪数据,不仅是数字世界的奥秘所在,更是我们探索未知、追求极致体验的重要工具。让我们一同揭开它的神秘面纱,感受科技带来的无限可能!
加速度计数据:揭秘运动背后的神秘力量
📊 在每一次疾驰、跳跃、或是微妙转身的背后,都隐藏着一种无声无息却至关重要的数据——加速度计数据。这短短的6字节,仿佛是一把钥匙,解锁了物体运动状态的全部奥秘。
加速度计,这个小小的传感器,如同一位静默的守护者,时刻记录着每一个细微的动作变化。无论是跑步时步伐的轻重缓急,还是驾车时车辆的加速与减速,甚至是飞行器在空中的姿态调整,加速度计都能以惊人的精度捕捉到每一个细微的瞬间。
这6字节的数据,或许在普通人眼中只是一串枯燥的数字,但在专业人士的手中,它们却如同珍贵的宝藏。通过对这些数据的分析,我们可以更加深入地了解物体的运动状态,为科学研究、工程设计、甚至是体育竞技提供有力的支持。
让我们一同揭开加速度计数据的神秘面纱,探索运动背后的无尽奥秘吧!🚀
全新突破!揭秘未来科技——外部传感器数据详解
🔍 在探索未知的科技领域里,每一个细节都蕴藏着无限的奥秘。今天,我们要带您深入解读的,是那些看似简单却又至关重要的“外部传感器数据”。这短短的6字节,不仅是机器感知世界的窗口,更是未来智能科技发展的关键钥匙。
🌐 想象一下,当我们置身于繁忙的都市街头,或是遥远的太空探险,是这些传感器数据,让我们能够实时感知环境的变化,从温度、湿度,到光照、压力,无一不被精准捕捉。正是这6字节的数据,构成了我们与未知世界的桥梁。
🚀 不仅如此,随着科技的飞速发展,这些外部传感器数据正在变得越来越重要。从智能家居的自动化控制,到无人驾驶汽车的智能导航,再到深海探测的精准定位,都离不开这些数据的支持。它们如同智能设备的“眼睛”和“耳朵”,让我们能够更深入地理解这个世界。
💡 让我们共同期待,随着技术的不断进步,这些外部传感器数据将在未来发挥更加重要的作用,为我们带来更多的便利和惊喜。这短短的6字节,不仅代表着技术的力量,更承载着我们对未知世界的无限憧憬和追求。
步数与时间的交织,每一步都刻印着时间的痕迹
每一步的行走,不仅是距离的累积,更是与时间的深情对话。每当我们迈出那坚定的一步,背后的6字节信息中,便悄然嵌入了一个独特的时间戳。它不仅仅是一个数字,更是我们与这个世界、与过去、与未来相连接的纽带。在每一次跨步的瞬间,我们都在用脚步丈量着时间,用时间记录着前行的每一步。因此,每一步都显得如此珍贵,每一刻都值得我们去珍惜。👣🕊️

设置FIFO水印
在深入探索LSM6DS3TR-C传感器的FIFO性能时,FIFO水印阈值的精确配置是至关重要的一环。这一配置过程主要依赖于FIFO_CTRL1和FIFO_CTRL2两个寄存器,它们联手为我们提供了精细的阈值设定能力。
首先,让我们聚焦在FIFO_CTRL1寄存器(地址0x06h)上。这个寄存器藏有低8位的水印阈值FTH_[7:0],每一位的跃动都代表着FIFO中2个字节(即1个字)的数据累积。
紧接着,FIFO_CTRL2寄存器(地址0x07h)则负责承载高3位的水印阈值FTH_[10:8]。与FIFO_CTRL1携手,它们共同为我们描绘出一个完整的阈值图景,让我们能够设定更高的水印阈值。
而在LSM6DS3TR-C传感器的世界里,FIFO的最小分辨率是1个最低有效位(LSB),这恰好对应于2个字节(即1个字)的数据。这意味着,无论是写入还是读取,FIFO中的数据都是以这2个字节为最小单位的。
因此,在配置FIFO时,我们必须牢记这一点,确保所设置的水印阈值与读取操作都严格遵循这个最小分辨率。例如,若我们设定水印阈值为2410,那么当FIFO中的数据累积达到2410*2个字节时,系统将自动触发水印事件(如中断)。根据这一最小分辨率,我们可以清晰地感知到,2410实际上代表了240个完整的数据块,即480个数据单位。
在LSM6DS3TR-C的旅程中,精确配置FIFO水印阈值将助您更高效地捕获和处理数据,让您的传感器体验更加流畅与精准。


/* Set FIFO watermark to a multiple of a pattern
* in this example we set watermark to 10 pattern
* which means ten sequence of:
* (GYRO + XL) = 12 bytes
* (external sensor+timestamp) = 12 bytes
*/
lsm6ds3tr_c_int1_route_t int_1_reg;
uint16_t pattern_len = 24; // 每个数据集由6个字节组成,4*6=24,每个数据块的大小是2个字节
lsm6ds3tr_c_fifo_watermark_set(&dev_ctx, 10 * pattern_len);
使用流模式
在深入探索FIFO模式的精妙之处时,我们不得不聚焦于寄存器FIFO_CTRL5的神奇设置。接下来,让我们一起领略这些设置是如何赋予FIFO灵活多变的工作特性的:
* FIFO_MODE_[2:0]:这是FIFO工作模式的核心控制器。每一个独特的组合都意味着一种独特的工作模式,为数据处理提供了无限的可能。
+ 000:在这个模式下,FIFO将停止其数据缓存的功能,进入Bypass模式。这意味着数据将直接通过,而不会被暂存在FIFO中。
+ 001:选择这个设置,FIFO将进入标准的缓存模式。当FIFO存储空间达到饱和时,它将停止收集新的数据,确保数据不会因溢出而丢失。
+ 011:在连续模式下,FIFO将持续不断地收集数据,直到外部触发器被激活。一旦触发器解除,FIFO将自动切换到标准的缓存模式,确保数据的完整性和安全性。
+ 100:这是一个混合模式,初始时FIFO处于Bypass状态,数据直接通过。但一旦触发器被激活,FIFO将无缝切换到连续模式,开始缓存数据。
+ 110:这是FIFO的“无限循环”模式。即使FIFO已满,新的数据样本也会毫不犹豫地覆盖最旧的样本,确保FIFO始终保持活跃状态,始终有最新的数据可供处理。
每一种模式都代表着一种数据处理策略,它们相互补充,共同构成了FIFO强大而灵活的数据处理能力。现在,就让我们一起利用这些模式,为数据处理带来前所未有的效率和便捷吧!

使用流模式有以下优点
实时洞察,无尽追踪: 在追求精确与速度的时代,持续数据采集如同一位不知疲倦的侦探,时刻为我们揭示着世界的每一个细微变化。无论是激烈运动中的实时跟踪,还是关键场景下的严密监控,它都能以无与伦比的稳定性与精确性,为我们提供持续、可靠的数据支持。
无需等待,无需停歇,持续数据采集技术如同开启了时间的窗口,让我们能够洞察每一个瞬息万变的瞬间。在这个快速变化的世界里,它成为了我们把握机遇、应对挑战的重要工具。
在如今瞬息万变的数字时代,数据的实时性至关重要。我们深知,掌握第一手、最新鲜的数据,就如同拥有了洞察未来的慧眼。因此,我们始终坚守数据最新性的承诺,确保每一份数据都是当下最真实、最及时的反映。让我们一同驾驭数据之翼,翱翔在瞬息万变的数字天空,捕捉那最精准的脉搏,为未来的决策奠定坚实的基础。
拥抱高效,实时刷新:面对繁忙的数据流,您无需再担忧FIFO(先进先出队列)的拥挤问题。当FIFO达到满载状态,新数据将智能地覆盖旧数据,实现无缝的自动更新,让您无需手动干预,即可畅享实时、流畅的数据传输体验。无需等待,无需担忧,一切尽在掌握,为您的工作与生活带来前所未有的便捷与高效!
/* Set FIFO mode to Stream mode */
lsm6ds3tr_c_fifo_mode_set(&dev_ctx, LSM6DS3TR_C_STREAM_MODE);
// /* Enable FIFO watermark interrupt generation on INT1 pin */
// lsm6ds3tr_c_pin_int1_route_get(&dev_ctx, ∫_1_reg);
// int_1_reg.int1_fth = PROPERTY_ENABLE;
// lsm6ds3tr_c_pin_int1_route_set(&dev_ctx, int_1_reg);
启用时间戳计数功能
赋予时间以生命,让数据跃然纸上——通过巧妙设置CTRL10_C寄存器中的timer_en和func_en位,LSM6DS3TR-C传感器的时间戳计数功能得以唤醒。这一创新的功能不仅仅是一个简单的计时器,它赋予了传感器记录事件发生精确时刻的能力,为时间同步提供了坚实的基础,更让数据记录和分析工作变得前所未有地便捷与高效。无需再为数据的时间线而苦恼,LSM6DS3TR-C的时间戳计数功能将为您的数据赋予生命的痕迹,让每一次测量、每一次记录都精准无误、清晰可见。

/* Enable timestamp and add it to FIFO */
lsm6ds3tr_c_timestamp_set(&dev_ctx, PROPERTY_ENABLE);
设置时间戳写入FIFO
LSM6DS3TR-C传感器,它不仅仅是一个数据收集器,更是一个智能的数据管家。其独特的时间戳批处理速率,如同精准的时间指挥家,确保每一份数据都拥有其独特的时间印记,让数据的流动更加有序。而温度数据批处理速率,则像是一位敏锐的感知者,实时捕捉环境温度的微妙变化,确保数据的准确性。
而增强的EIS陀螺仪输出批处理,更是赋予了传感器超凡的感知能力,无论是微小的震动还是快速的旋转,都能被其精准捕捉并转化为数据。而这一切,都离不开FIFO工作模式的支持,它如同一个高效的数据仓库,确保数据的存储和读取都能以最优的速率进行。
这些先进的配置,共同构成了LSM6DS3TR-C传感器的强大内核,使其能够根据不同的应用需求,以适当的速率和模式进行数据的批处理和存储。无论是需要高精度的时间同步,还是对环境温度的敏感监测,亦或是对快速运动的精准捕捉,LSM6DS3TR-C传感器都能轻松应对,为您的应用提供强大的数据支持。

在FIFO_CTRL2寄存器中,隐藏着一个强大的控制开关——`timer_pedo_fifo_en`位。这个位能够决定步数计数器和珍贵的时间戳数据是否会被巧妙地嵌入到第四个FIFO数据集中。接下来,让我们深入探索其背后的奥秘:
* 禁用状态(0):想象一下,如果你将这个开关调至“0”的位置,步数计数器和时间戳数据就像被施了隐身术,它们将不会在FIFO的队列中留下任何痕迹。是的,它们就像从未存在过一样,默默地从你的视野中消失。
* 启用状态(1):但如果你勇敢地转动这个开关,将其调至“1”的位置,那么,神奇的事情就会发生!步数计数器和时间戳数据将被精心打包,然后作为第四个数据集,优雅地加入到FIFO的队列中。它们就像被赋予了生命,等待着你的召唤,为你提供精确的数据支持。
这个`timer_pedo_fifo_en`位,就像是一个神奇的钥匙,掌握着步数计数器和时间戳数据在FIFO中的命运。无论你是希望它们默默消失,还是希望它们为你提供有力的数据支持,都只需轻轻一转,便可实现你的愿望。
lsm6ds3tr_c_fifo_pedo_and_timestamp_batch_set(&dev_ctx,PROPERTY_ENABLE);
设置时间戳分辨率
在探索时间精度的奥秘时,我们不得不提及一个关键的步骤——调整`WAKE_UP_DUR`寄存器中的`TIMER_HR`位。这个操作犹如赋予时钟更精确的刻度,它能够影响时间戳寄存器的分辨率,让时间的流逝在我们手中变得更为细腻和可控。想象一下,当你轻轻转动这个精密的旋钮,时间的精度便随之跃升,为你的应用带来前所未有的精确度和可靠性。无需复杂的操作,只需简单设置,即可开启时间的新篇章。

在数字时代的浪潮中,我们不容忽视的是那一串串精密且至关重要的数字——时间戳数据。这些数据,它们不仅代表着时间的流转,更是信息安全、数据完整性不可或缺的一环。而今,我们所提及的时间戳数据,其长度已经达到了令人瞩目的24位,意味着更为精细、更为严密的时间记录与安全保障。
无论是金融交易、合同签署,还是在线文档的传输与存储,时间戳都发挥着至关重要的作用。它们如同守护神一般,默默守护着每一条数据的真实性与完整性,确保信息的不可篡改与可追溯。
在24位的时间戳数据背后,是科技的力量与智慧的结晶。它们以无比精确的方式记录着每一刻的变迁,让我们能够在数字世界中,依然能够感知到时间的流逝与历史的沉淀。
让我们共同珍视这24位的时间戳数据,它们不仅是数字时代的产物,更是我们追求真实、追求安全、追求信任的重要工具。

/* Set the timestamp resolution to 25 μs (TIMER_HR bit in WAKE_UP_DUR register) */
lsm6ds3tr_c_timestamp_res_set(&dev_ctx, LSM6DS3TR_C_LSB_25us);
FIFO存储时间戳设置
通过配置FIFO_CTRL4寄存器中的DEC_DS4_FIFO[2:0]字段来选择第4组FIFO数据集的降采样因子。


lsm6ds3tr_c_fifo_dataset_3_batch_set(&dev_ctx, LSM6DS3TR_C_FIFO_DS3_NO_DEC);
//FIFO_CTRL4 (09h)- >DEC_DS4_FIFO[2:0]
lsm6ds3tr_c_fifo_dataset_4_batch_set(&dev_ctx, LSM6DS3TR_C_FIFO_DS4_NO_DEC);
在探索运动追踪的无限可能时,让我们一同领略FIFO_CTRL2寄存器的独特魅力。只需轻轻一动,通过设置FIFO_CTRL2寄存器中的TIMER_PEDO_FIFO_EN和TIMER_PEDO_FIFO_DRDY位,您便能轻松启用并精细配置步数计数和时间戳数据的存储。这一简单步骤,不仅将为您的运动数据记录带来前所未有的精准度,更能让您感受到科技对日常健康的深切关怀。让每一步都留下印记,让每一次运动都成为记录美好时光的珍贵瞬间。

// 启用时间戳写入FIFO第四数据集
//FIFO_CTRL2 (07h)- >TIMER_PEDO_FIFO_EN
lsm6ds3tr_c_fifo_pedo_and_timestamp_batch_set(&dev_ctx, PROPERTY_ENABLE);
设置FIFO速率
LSM6DS3TR-C传感器中的FIFO控制寄存器3(FIFO_CTRL3)堪称数据处理的精髓所在,它巧妙地掌控着陀螺仪和加速度计数据写入FIFO的批处理数据速率(BDR,Batch Data Rate)。让我们一同深入探索其背后的奥秘:
位于地址09h的FIFO_CTRL3寄存器,宛如一个智能的指挥家,通过精心编排,实现了数据的高效流转。它拥有两大核心字段,各自承载着不同的使命:
* DEC_FIFO_GYRO [2:0]:这是陀螺仪数据的批处理速率选择器。它如同一位敏锐的舞者,根据需求灵活调整陀螺仪数据的输出频率,确保数据的准确性和实时性。
* DEC_FIFO_XL [2:0]:而这里,则是加速度计数据的批处理速率选择器。它像是一位严谨的工程师,精确控制加速度计数据的输出速度,为各种应用场景提供稳定可靠的数据支持。
在LSM6DS3TR-C传感器的世界里,FIFO_CTRL3寄存器以其独特的魅力,引领着陀螺仪和加速度计数据在FIFO中舞动,展现出卓越的性能和无限的可能。

深入探索FIFO_CTRL3寄存器的强大功能,特别是其DEC_FIFO_XL字段,它赋予了您灵活配置加速度计数据的FIFO去采样率的权力。现在,让我们一起解锁它的潜力吧!
DEC_FIFO_XL [2:0] 这一关键字段,就如同一位细心的工匠,精确雕琢着加速度计数据的FIFO去采样率。通过它,您可以随心所欲地定制数据的流动速率,满足您的各种应用需求。
* 000: 这意味着加速度计传感器与FIFO完全脱钩,数据不会进入FIFO队列。
* 001: 这是一个特殊的设置,它让加速度计数据以原始速率直接写入FIFO,不进行任何去采样处理。这意味着,您将获得与加速度计输出数据速率(ODR)完全同步的FIFO写入速率。
* 010: 当您选择这个设置时,去采样因子为2,意味着数据写入FIFO的速率是加速度计ODR的一半。
* 011 至 111: 随着您向这些更高位数值的探索,去采样因子也相应地增加到3、4、8、16乃至32倍。这种逐步降低的数据速率,对于需要更长时间窗口进行数据分析或资源受限的应用来说,无疑是极大的福音。
通过精心调整DEC_FIFO_XL字段的值,您可以轻松地在数据精度和系统资源之间找到完美的平衡。无论您是追求极致的实时性,还是寻求更长的数据记录时间,FIFO_CTRL3寄存器的DEC_FIFO_XL字段都将是您不可或缺的利器。让我们一起挖掘其更深层次的潜能,开启数据处理的新篇章!
/* Set FIFO batch XL/Gyro ODR to 12.5Hz */
lsm6ds3tr_c_fifo_xl_batch_set(&dev_ctx,LSM6DS3TR_C_FIFO_XL_NO_DEC);
lsm6ds3tr_c_fifo_gy_batch_set(&dev_ctx,LSM6DS3TR_C_FIFO_GY_NO_DEC);
当您渴望精确地调控传感器数据时,FIFO(先进先出)模式将成为您的得力助手。通过精心设计的FIFO_CTRL5寄存器,您能够轻松设置FIFO数据,不仅如此,您还能细致地配置传感器的FIFO模式和数据输出速率。这一灵活的功能,旨在满足从简单到复杂,从日常到专业级的各种应用需求。让您的设备在瞬息万变的环境中保持精准与高效,成就卓越性能。

/* Set ODR FIFO */
lsm6ds3tr_c_fifo_data_rate_set(&dev_ctx, LSM6DS3TR_C_FIFO_26Hz);
初始化
/* USER CODE BEGIN 2 */
printf("HELLO!n");
HAL_GPIO_WritePin(CS1_GPIO_Port, CS1_Pin, GPIO_PIN_SET);
HAL_GPIO_WritePin(SA0_GPIO_Port, SA0_Pin, GPIO_PIN_RESET);
HAL_GPIO_WritePin(CS2_GPIO_Port, CS2_Pin, GPIO_PIN_SET);
HAL_Delay(100);
/* Initialize mems driver interface */
stmdev_ctx_t dev_ctx;
dev_ctx.write_reg = platform_write;
dev_ctx.read_reg = platform_read;
dev_ctx.mdelay = platform_delay;
dev_ctx.handle = &SENSOR_BUS;
/* Init test platform */
// platform_init();
/* Wait sensor boot time */
platform_delay(BOOT_TIME);
/* Check device ID */
whoamI = 0;
lsm6ds3tr_c_device_id_get(&dev_ctx, &whoamI);
printf("LSM6DS3TR-C_ID=0x%x,whoamI=0x%x"
LSM6DS3TR_C_ID,whoamI);
if ( whoamI != LSM6DS3TR_C_ID )
while (1); /*manage here device not found */
/* Restore default configuration */
lsm6ds3tr_c_reset_set(&dev_ctx, PROPERTY_ENABLE);
do {
lsm6ds3tr_c_reset_get(&dev_ctx, &rst);
} while (rst);
/* 设置加速度计和陀螺仪的满量程范围 */
lsm6ds3tr_c_xl_full_scale_set(&dev_ctx, LSM6DS3TR_C_2g);
lsm6ds3tr_c_gy_full_scale_set(&dev_ctx, LSM6DS3TR_C_2000dps);
/* 启用块数据更新(BDU),当FIFO支持时 */
lsm6ds3tr_c_block_data_update_set(&dev_ctx, PROPERTY_ENABLE);
/* 设置加速度计和陀螺仪的输出数据速率:
* 在本例中,我们将加速度计和陀螺仪的速率设置为26 Hz
*/
lsm6ds3tr_c_xl_data_rate_set(&dev_ctx, LSM6DS3TR_C_XL_ODR_26Hz);
lsm6ds3tr_c_gy_data_rate_set(&dev_ctx, LSM6DS3TR_C_GY_ODR_26Hz);
/* 设置FIFO水印为模式的倍数
* 在本例中,我们将水印设置为10个模式
* 这意味着10个序列:
* (陀螺仪 + 加速度计) = 12字节
* (外部传感器 + 时间戳) = 12字节
*/
lsm6ds3tr_c_int1_route_t int_1_reg;
uint16_t pattern_len = 24; // 每个数据集由6个字节组成,4*6=24
lsm6ds3tr_c_fifo_watermark_set(&dev_ctx, 10 * pattern_len);
/* 将FIFO模式设置为流模式 */
//FIFO_CTRL5(0x0A)- >STREAM_MODE
lsm6ds3tr_c_fifo_mode_set(&dev_ctx, LSM6DS3TR_C_STREAM_MODE);
/* 启用时间戳并将其添加到FIFO */
//CTRL10_C (19h)- >TIMER_EN
lsm6ds3tr_c_timestamp_set(&dev_ctx, PROPERTY_ENABLE);
//CTRL10_C (19h)- >PEDO_EN
lsm6ds3tr_c_pedo_sens_set(&dev_ctx, PROPERTY_ENABLE); // 根据需求配置步数计数
/* 将时间戳分辨率设置为25 μs (WAKE_UP_DUR寄存器中的TIMER_HR位) */
//WAKE_UP_DUR (5Ch)- >TIMER_HR
lsm6ds3tr_c_timestamp_res_set(&dev_ctx, LSM6DS3TR_C_LSB_25us);
//设置第3数据集(Dataset 3)的降采样因子
lsm6ds3tr_c_fifo_dataset_3_batch_set(&dev_ctx, LSM6DS3TR_C_FIFO_DS3_NO_DEC);
//设置第4数据集(Dataset 4)的降采样因子
//FIFO_CTRL4 (09h)- >DEC_DS4_FIFO[2:0]
lsm6ds3tr_c_fifo_dataset_4_batch_set(&dev_ctx, LSM6DS3TR_C_FIFO_DS4_NO_DEC);
// 启用时间戳写入FIFO第四数据集
//FIFO_CTRL2 (07h)- >TIMER_PEDO_FIFO_EN
lsm6ds3tr_c_fifo_pedo_and_timestamp_batch_set(&dev_ctx, PROPERTY_ENABLE);
/* 设置FIFO传感器的降采样因子 */
lsm6ds3tr_c_fifo_xl_batch_set(&dev_ctx, LSM6DS3TR_C_FIFO_XL_NO_DEC);
lsm6ds3tr_c_fifo_gy_batch_set(&dev_ctx, LSM6DS3TR_C_FIFO_GY_NO_DEC);
/* 设置FIFO的输出数据速率 */
//FIFO_CTRL5 (0Ah)
lsm6ds3tr_c_fifo_data_rate_set(&dev_ctx, LSM6DS3TR_C_FIFO_26Hz);
/* USER CODE END 2 */
获取FIFO数据
在深入探索数据处理机制时,一个独特而精巧的设计脱颖而出:当连续对FIFO(先进先出)输出寄存器FIFO_DATA_OUT_L(3Eh)和FIFO_DATA_OUT_H(3Fh)进行读取操作时,一个精密的舍入功能将悄无声息地启动。这不仅仅是一个简单的数据读取过程,更是一次高效、准确的数据处理之旅。无需人工干预,系统便能自动校准和修正数据,确保每一次读取都能得到最精确、最可靠的结果。
这一设计不仅彰显了工程师们的匠心独运,也体现了对数据精确性和处理效率的不懈追求。在数字世界的洪流中,这一舍入功能如同一位默默奉献的守护者,确保着数据流动的准确性和流畅性。


引领未来,LSM6DS3TR-C传感器数据读取新篇章
在科技的浪潮中,LSM6DS3TR-C传感器正以其卓越的性能,引领我们进入一个全新的数据感知时代。不仅仅是一个简单的设备,它更是一个高效、精准的数据采集器,能够实时捕捉并处理加速度、角速度、时间戳以及外部传感器数据。
想象一下,通过精确的配置,LSM6DS3TR-C传感器仿佛打开了一扇通向数据世界的大门。每一次的FIFO读取,都是对未知世界的探索,每一次的数据传输,都是对精准度的追求。它不仅仅是一个工具,更是我们探索未知、追求卓越的得力助手。
在数据的海洋中,LSM6DS3TR-C传感器以其独特的魅力,让我们能够更深入地了解世界,更精准地把握未来。让我们携手并进,共同开启这段充满无限可能的旅程吧!
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
uint16_t num = 0,num1=0;
uint16_t num_pattern = 0;
uint8_t waterm = 0;
/* 读取LSM6DS3TR-C的水印标志 */
lsm6ds3tr_c_fifo_wtm_flag_get(&dev_ctx, &waterm);
if (waterm) {
/* 读取FIFO中的字数 */
lsm6ds3tr_c_fifo_data_level_get(&dev_ctx, #);
num_pattern = num / 24*2;
printf("num=%dn"
num);
while (num_pattern-- > 0) {
printf ("num1=%dn"
num1);
num1++;
/* 根据传感器的ODR配置,FIFO模式由以下样本序列组成:GYRO, XL 外部传感器 时间戳*/
lsm6ds3tr_c_fifo_raw_data_get(&dev_ctx,
data_raw_angular_rate.u8bit,
3 * sizeof(int16_t));
angular_rate_mdps[0] =
lsm6ds3tr_c_from_fs2000dps_to_mdps(data_raw_angular_rate.i16bit[0]);
angular_rate_mdps[1] =
lsm6ds3tr_c_from_fs2000dps_to_mdps(data_raw_angular_rate.i16bit[1]);
angular_rate_mdps[2] =
lsm6ds3tr_c_from_fs2000dps_to_mdps(data_raw_angular_rate.i16bit[2]);
printf(
"Angular rate [mdps]:%4.2ft%4.2ft%4.2frn"
angular_rate_mdps[0], angular_rate_mdps[1], angular_rate_mdps[2]);
lsm6ds3tr_c_fifo_raw_data_get(&dev_ctx,
data_raw_acceleration.u8bit,
3 * sizeof(int16_t));
acceleration_mg[0] =
lsm6ds3tr_c_from_fs2g_to_mg(data_raw_acceleration.i16bit[0]);
acceleration_mg[1] =
lsm6ds3tr_c_from_fs2g_to_mg(data_raw_acceleration.i16bit[1]);
acceleration_mg[2] =
lsm6ds3tr_c_from_fs2g_to_mg(data_raw_acceleration.i16bit[2]);
printf("Acc [mg]:%4.2ft%4.2ft%4.2frn"
acceleration_mg[0], acceleration_mg[1], acceleration_mg[2]);
//外部传感器数据
lsm6ds3tr_c_fifo_raw_data_get(&dev_ctx,
data_raw_none.u8bit,
3 * sizeof(int16_t));
// 打印外部传感器数据
printf("External sensor data: %02x %02x %02x %02x %02x %02xrn"
data_raw_none.u8bit[0], data_raw_none.u8bit[1], data_raw_none.u8bit[2],
data_raw_none.u8bit[3], data_raw_none.u8bit[4], data_raw_none.u8bit[5]);
/* 读取时间戳数据 */
uint32_t timestamp=0;
lsm6ds3tr_c_fifo_raw_data_get(&dev_ctx,
data_raw_Timestamp.u8bit,
3*sizeof(int16_t));//
for(int i=0;i< 6;i++)
{
printf("t[%d]=%d "
i,data_raw_Timestamp.u8bit[i]);
}
timestamp=(data_raw_Timestamp.u8bit[1]< < 16)|(data_raw_Timestamp.u8bit[0]< < 8)
|(data_raw_Timestamp.u8bit[3]);
printf("Timestamp: %urn"
timestamp);
}
}
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
演示
以下是改写后的文字内容,旨在丰富并增强感染力,同时保持HTML标签和图片不变更:
以下的精彩实测数据,将带您领略高性能的极致魅力!我们精选了20个关键数据点,为您揭示真实的速度与激情。
在这组数据中,加速度速率与角速度速率均达到了惊人的26Hz,这意味着无论是加速还是旋转,都如闪电般迅疾,让您感受到无与伦比的操控体验。
而时间戳速率的精确性更是令人叹为观止。每秒26次的时间戳更新,换算下来仅为38.46毫秒的响应时间。这种毫秒级别的速度,确保了每一次操作都能得到即时的反馈,让您尽享流畅自如的操控乐趣。
为了更直观地展示这一卓越性能,我们特别选取了两组时间戳数据:5825473和5823931。您瞧,仅仅相差1542个单位,但乘以25微秒之后,就是38.550毫秒的微小差距。这种精度的把控,正是我们追求极致性能的不懈努力。
(请见下方图示,直观感受这令人震撼的速度与精度。)
让我们一起沉浸在这极速的世界里,感受科技带来的无限可能!
请注意,由于您没有提供具体的HTML图片标签,我在上文中使用了注释来指示图片标签的位置。在实际应用中,您可以将注释替换为具体的``标签及其属性。

当您浏览这篇精心编排的文章时,您会发现它蕴含着无尽的智慧和深邃的思考。每一字、每一句都凝聚着无数的心血与汗水,只为将最真实、最动人的故事呈现给您。无需华丽的辞藻,我们用心书写,用情传达,只为与您共同探索这世界的奥秘与美好。在这里,我们诚邀您一同沉浸于这场思想的盛宴,让智慧的光芒照亮前行的道路。

























